Student Notable
Health & Wellness Award
Core77 Design Awards 2020
Results Announced for Community Choice Prize
See All Winners
symbio: intelligent, natural and comfortable exoskeleton for walking rehabilitation
symbio is an intelligent, natural and comfortable exoskeleton for walking rehabilitation.
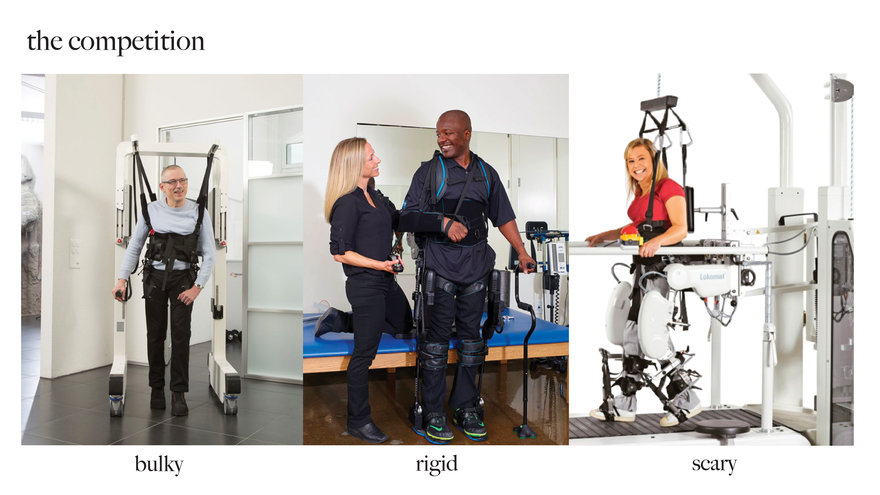
Current exoskeletons are bulky, rigid and intimidating. Most tether the patient to one location like a puppet.
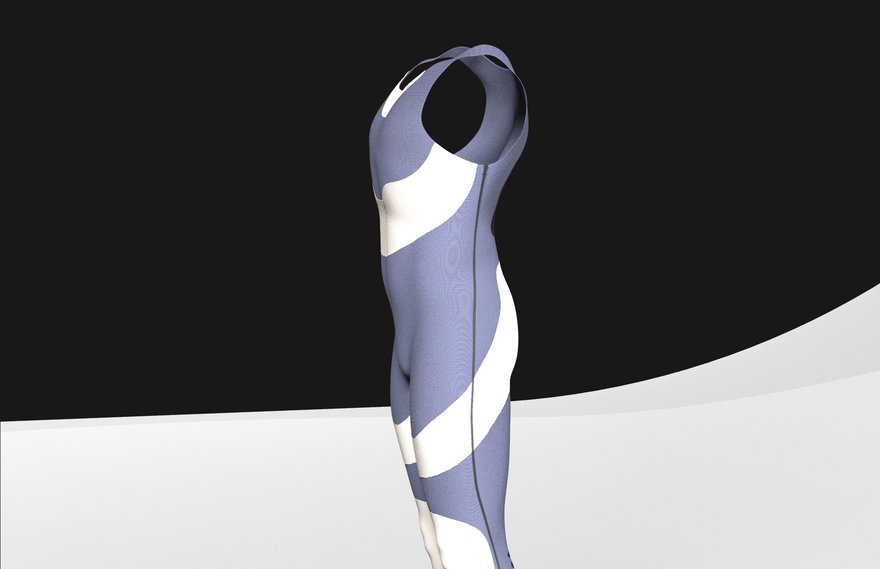
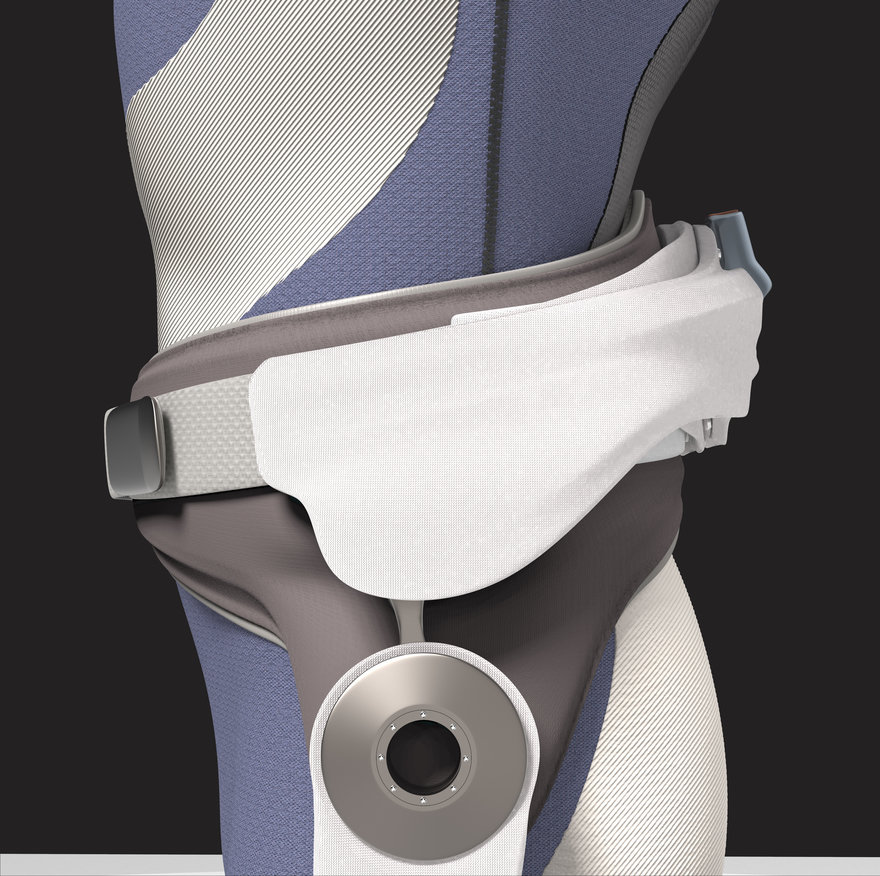
Aesthetically, symbio's five piece design (i.e. a base compression layer, waist belt, leg wraps and walking boots) looks more like Nike athletic equipment than a wearable robot. Inspired by the human body, symbio is a hybrid exoskeleton of both soft and hard components and materials, mirroring the body's own muscle, tissue and bone. The layers closest to the body are made of soft, stretchable fabric (i.e. neoprene and flyknit). To add strength, the layers on top become progressively more rigid towards the exoskeletal limbs, which are made of kevlar and carbon fiber and thereby minimize weight while maximizing strength. Each patient also wears a comfortable, flyknit compression layer which they can take home to launder and for easy donning and doffing in the comfort of their own home.
symbio achieves more natural movement than the competition, specifically by allowing for movement in the core and by removing the linkages, found on all other walking rehab exoskeletons, between the major limbs in the lower body. This is achieved through the use of robotic hip ball joints, a motor positioned at the core, and a uniquely designed mounting system for the joint motors and assistive limbs. Kevlar mounting registration points, where the carbon fiber limbs attach, are hardened then bonded and industrially sewn directly onto high density foam plates located within the soft fabric of the leg wraps. This layered construction provides comfort on the inside while still providing the needed rigidity to allow for the rotational torque of the assistive motors.
With the use of advanced technologies, symbio moves symbiotically with the wearer. Combining machine learning, force and positional microsensors within the fabric layers, and slim yet powerful axial flux motors at the body's natural rotational points allow for seamless coordination between body and machine. This powerful and intelligent symbiotic system can prevent falls by providing the right amount of rotational force in the right place at the right time. Its machine learning capabilities also aids in optimizing the limited training sessions that are typically available to patients. Informed by real-time biometrics, symbio safely and knowledgeably reduces the amount of assistance it provides over time and helps simplify the walking rehab planning process for physical therapists.







The Design Brief
Our design brief was an open ended challenge to design a business that capitalizes on the potential opportunity of automation and robotics technologies in the year 2030.
Project scope:
Research and envision the future context, needs, wants and desires of consumers in North America in 2020 to 2030
Envision a new business that meets the needs, wants and desires of consumers with automation and robotics based solutions and sustainable competitive advantages in 2030
Create a roadmap from 2020 of the R&D and business activities the company would engage in to achieve the vision in 2030
The Future of Robotics and Automation
Currently robotics and automation technologies are mainly being leveraged in industrial and manufacturing use cases. However, every day we are advancing in these technologies. Before we know it, robots will become ubiquitous in the consumer space, and as they do they will one day be regarded as their own organisms.This is perhaps actually happening sooner than expected. Sophia, the humanoid robot, is an example. She was created for one purpose--to socialize with humans. She can follow faces, sustain eye contact, and even have full conversations with humans. She is the first robot to have been awarded citizenship by any country. While some day humanoid robots and humans will be living side by side harmoniously, it may take some decades to accomplish. Today, machines and robots mainly do undesirable or repetitive tasks for us. Since robotics and automation are advancing quickly however, the next step is to find ways to foster a more symbiotic relationship between man and machine. This symbiosis would allow humans to do things that were impossible before. Physical therapy is a perfect place to achieve this symbiosis, specifically, walking rehabilitation, also known by physical therapists as overground gait training.The Case for Robotic-Assistive Walking Rehabilitation
From the onset of the project, there were three main design challenges:
1 Designing an exoskeleton with an appearance more like athletic gear that feels natural and organic, versus today's robotic, intimidating, and bulky products.
2 Designing and engineering an exoskeleton that is safe and strong, yet comfortable and less rigid than existing competitors.
3 Improving the experience of both the healthcare professionals and the patient.
Research
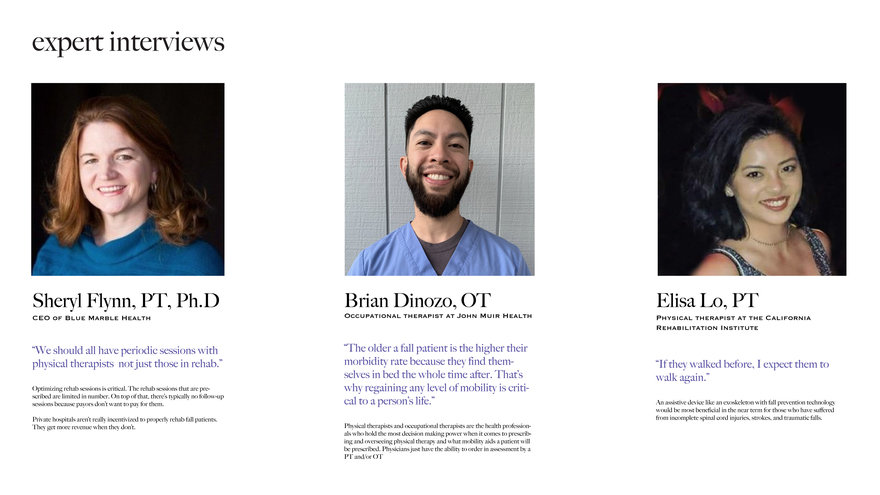
By interviewing physical therapists, occupational therapists, physicians, and even a CEO of a startup in this space, I learned that physical therapists (PTs) hold considerable influence in this arena. They are the main decision makers regarding which equipment will be used, and completely control the programming of a patient's walking rehabilitation. My conversations with PTs helped me to uncover three main insights:
1 Safety is paramount for both the patient and PT.
2 Set up, tear down and cleaning needs to be as easy as possible.
3 PTs would like a way to make more informed decisions regarding their rehab programs.
Design Details
I designed symbio to improve the user experience of the physical therapist and the patient in several ways.
From the patient's perspective, the sportswear-like aesthetics provide a more welcoming and encouraging experience during this very stressful and emotional time of learning to walk again. symbio's lighter and more fluid construction also provides a more comfortable experience for the user during their strenuous training. Also, instead of feeling as if a robot is puppeting them around, the user feels as if they, on their own, are learning to walk again.
The first layer of symbio is a comfortable and strong flyknit compression layer that can be brought home by the patient for easy washing. This also simplifies the cleaning and sanitation of the rest of the exoskeleton by the physical therapist. The bottom-to-top side zipper design, reminiscent of a wetsuit, allows for easy donning and doffing by the patient in the comfort of their own home.Physical therapists sometimes feel they are guessing when deciding which equipment and what exercises to use. symbio's smart symbiotic system simplifies the planning of gait training sessions. The machine learning- and AI-enabled system ensures the patient is safe during the training, and minimizes the risk of physical therapist injuries, which are common today. This also allows the physical therapist to optimize the sessions, as they are able to fully focus on observing even the most subtle abnormalities in their patient's gait. Because symbio tracks the patient's biometric and performance data in real time, the physical therapist can easily analyze progress and plan for reducing symbio's assistance over time.
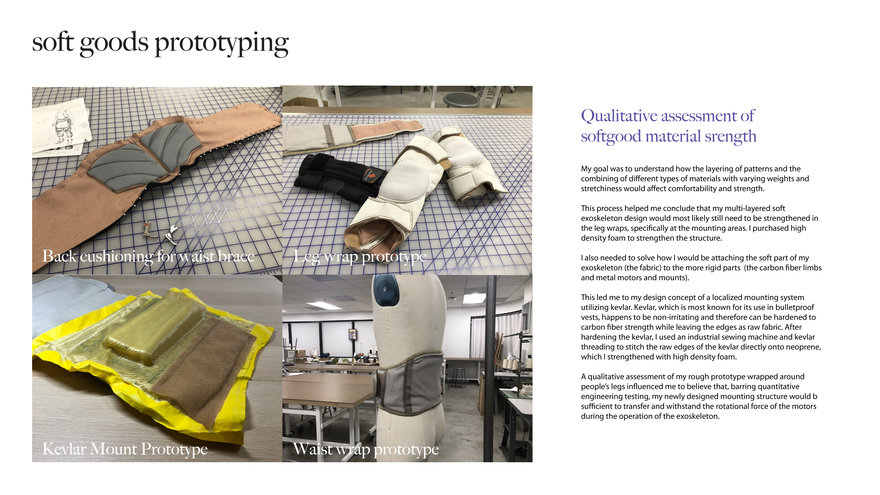
Prototyping and TestingAlthough I did exhaustive research on biomechanics, advanced technologies and materials, and engineering requirements by leveraging my Navy nuclear engineering background, I wanted to test as many of my concepts as best I could. To do this, I created my own soft good prototypes for the leg wraps and waist wrap. My goal was to understand how the layering of patterns and the combining of different types of materials with varying weights and stretchiness would affect comfort and strength. This process helped me conclude that my multi-layered soft exoskeleton design would most likely still need to be strengthened in the leg wraps, specifically at the mounting areas. I added high density foam to strengthen these parts of the structure.
In parallel, I needed to solve how I would be attaching the soft part of my exoskeleton (the fabric) to the more rigid parts (the carbon fiber limbs and metal motors and mounts). This then helped me to research and uncover kevlar as a potential material. I proposed a localized kevlar mounting system which incorporates a multi-layered construction and does away with the need to mechanically connect the exoskeleton from top to bottom for rigidity. I then purchased kevlar to test out my concept. Kevlar, which is most known for its use in bulletproof vests, happens to be non-irritating and therefore can be hardened to carbon fiber strength while leaving the edges as raw fabric. After hardening the kevlar, I used an industrial sewing machine and kevlar thread to stitch the raw edges of the kevlar directly onto the neoprene, which I strengthened with high density foam.
A qualitative assessment of my rough prototype wrapped around people's legs influenced me to believe that, barring quantitative engineering testing, my newly designed mounting structure would be sufficient to transfer and withstand the rotational force of the motors during the operation of the exoskeleton.Core77 Design Awards 2020
- Built Environment
- Commercial Equipment
- Consumer Technology
- Design Education Initiative
- Design for Social Impact
- Furniture & Lighting
- Health & Wellness
- Home & Living
- Interaction
- Packaging
- Personal Accessory
- Service Design
- Speculative Design
- Sports & Recreation
- Strategy & Research
- Tools & Work
- Transportation
- Visual Communication